Currency
Toggle Nav





4WD Smart RC Car Chassis with S3003 Metal Servo & Bearing Kit for Arduino
$34.90
Availability:
In stock
SKU
RBP68138C
Brand
elecrow
Weight
780g
Related Products:


【4WD RC Car】Rear-wheel drive, can realize the car forward, backward, left, and right turns
【Excellent workmanship】All-metal motor, excellent workmanship
【Compatible with Arduino platform】Provide fixed mounting holes for the Arduino platform
Frequently Bought Together





Description
This is a newly designed 4-wheel car chassis, and ordinary 4-wheel drive is different from this car with rear-wheel drive plus front steering mechanism to achieve the car forward, backward, and turn left and right.
Professional remote control racing principle, the use of two rods through the steering servo to control the direction of the car. In addition, the steering mechanism of the rear wheel has also been changed. The aluminum fixing piece is integrally formed with the motor and the motor is tightly engaged with the drive shaft. The motor adopts the all-metal gear motor. If you pursue high speed, As long as the 25mm shaft diameter motor can be. The rear wheel incorporates two flange cup bearings to ensure a more flexible motor rotation.
Because of the use of more precious metal parts (bearings, transmission gear, connecting rod, metal motor, steering cup, multi-function bracket, etc.), which is expensive, the user can compare the merits, of course, the market is also cheaper Similar to the chassis, work is not on a level of the.
We only have fixed mounting holes for the Arduino platform, if you are on other platforms, you need to punch holes or try to install them.

Features
-
All-metal motor rear-wheel drive
-
Using steering gear control car steering
-
Steering structure with bearings, transmission loss
Specifications
-
Motor model:JGA25-370
-
Motor work voltage: 6-12V
-
Servo model: MG996
-
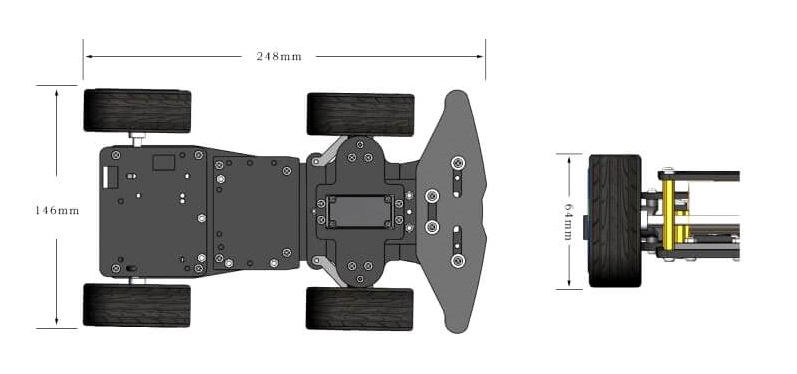
Car size: 248mm(l) x 146mm(w) x 70mm(h)
-
Weight: 680g
Package list
-
Metal chassis x 1
-
Acrylic chassis x 2
-
65 MM wheels x4
-
Anti-collision cotton x1
-
Metal gear motor x1
-
Engine counting bracket x1
-
Steering wheel x 2
-
Rear-wheel link x1
-
Rolling bearing flange x2
-
17 MILLIMETERS D-5MM coupling x2
-
MG996R actuator x1
-
Servo arm x1
-
L Mount bracket x1
-
Sector x 2
-
Pull rod x2
-
Steering bellcrank x2
-
Transmission link x2
-
Bearing (8mm) x 2
-
Bearing (12mm) x 2
-
M2*10mm Aluminum column x 3
-
Hexagon adapter x 2
-
Switch x1
-
M3 * 16mm passage double copper column x 4
-
M3 * 22mm passage double copper column x 8
-
M3 * 35mm passage double copper column x 4
-
M3 * 5mm head screwdriver x3
-
M3 * 5mm screwdriver x15
-
M3 * 8mm screwdriver x40
-
M2.5 * 10mm Screw x 10
-
M2.5 locknut x 2
-
M4 locknut x 3
-
Gasket x4
-
Cross sleeve x1
-
Cable ties x6
-
22AWG wire x 3
-
Heat shrink tube x1
- Tool x1
Wiki & External links
Write Your Own Review
Bestselling Products You May Like




New Products You May Want






Warranty
Service
VIP Distributor
Discount
Professional
Tech Support
Fast
Delivery
×
 Add to cart successfully!
Add to cart successfully!
Customers Who View This Item Also Bought