Currency
Toggle Nav

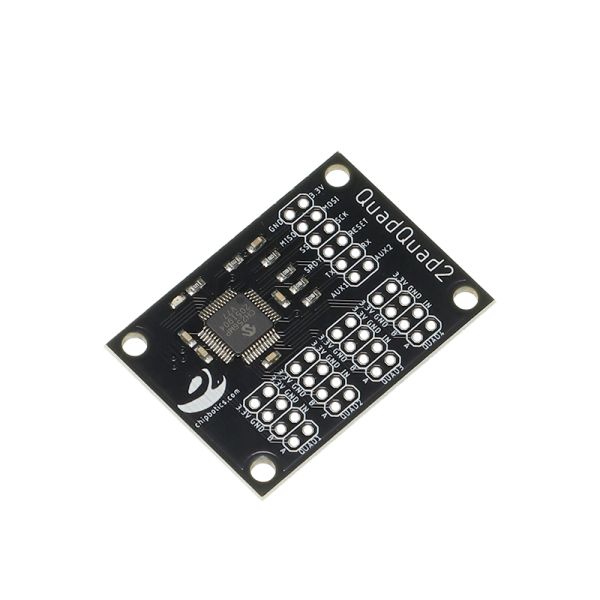



QuadQuad2 - 4ch Quadrature Decoder
$15.00
Availability:
In stock
SKU
CQD24001D
Weight
45g
Provides position and velocity information for up to four incremental quadrature encoders via SPI.
Frequently Bought Together






QuadQuad2 allows position and velocity information to be read from up to four incremental quadrature encoders simultaneously via SPI. These encoders are typically found on the shaft of a motor, allowing the motor rotation angle and velocity to be measured. When used on a robot wheel motor, this would allow you to measure how far your robot has moved and how fast and makes closed-loop control possible.
Features: Four quadrature channels (sampled 4x per detent) | Provides position (8, 16 or 32-bit), velocity, status and timing metadata | Velocity up to 50,000 transitions/s | Home/index inputs | SPI slave interface | Streamed or polled data packets | Operating voltage 3.3V | Supports 4x Pololu HP motors at their maximum rated shaft speed of 30,000 RPM | Arduino library and demo available
QuadQuad2 measures all channels simultaneously, which has a distinct advantage over reading separate decoder chips, which have to be read one at a time and the resulting data would be unsynchronized and slow. This synchronization is important if you want to combine feedback from multiple motors to drive in a straight line, do Ackerman steering or detect wheel slipping, for example.
A complete Arduino library and demo code is available for free, as well as a Datasheet detailing physical connections and protocol.
The PCB comes without any headers.
Write Your Own Review
Bestselling Products You May Like




New Products You May Want

RTD2556 Driver Board/Controller Board for HD Monitor With EDP 30Pin 1920x1080p Touch Function
was
$20.90
Special Price
$14.63





Warranty
Service
VIP Distributor
Discount
Professional
Tech Support
Fast
Delivery
×
 Add to cart successfully!
Add to cart successfully!
Customers Who View This Item Also Bought