
Story
Project Title: Chandrayaan-3 Inspired Rover Model with Obstacle Detection
Guided by: Pratibha Gahlot\ Department: Electronics and Communication Engineering\ College: Aravali
College of Engineering and Management
1. Introduction
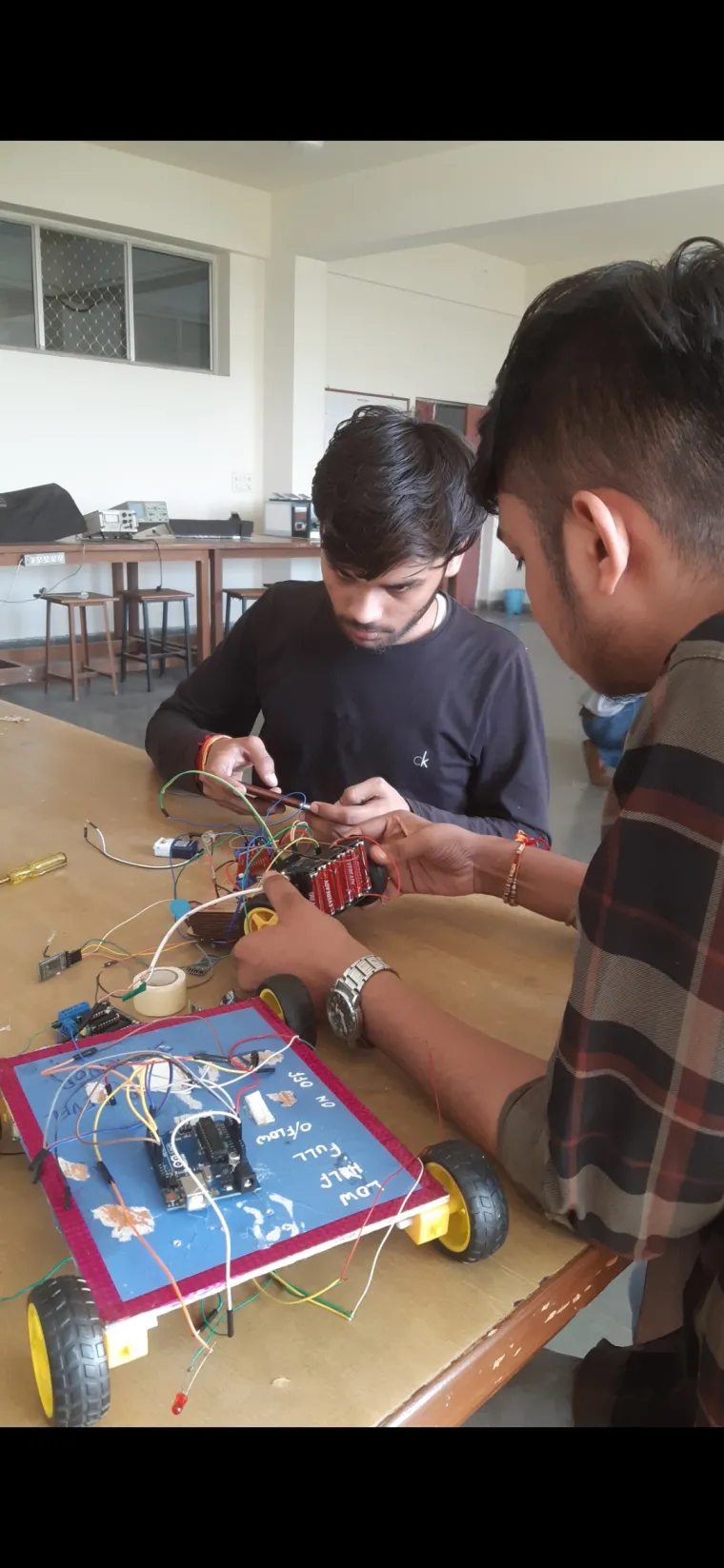
This project is a working model inspired by ISRO's Chandrayaan-3 lunar rover mission. The purpose of the
project is to help students understand the basics of robotics, obstacle detection, and wireless control using
Arduino and ESP8266. The rover model replicates the concept of terrain navigation and autonomous
obstacle avoidance.
2. Features
Wireless control capability using Wi-Fi (ESP8266)
Obstacle detection using ultrasonic sensor
Autonomous navigation logic
Compact, lightweight rover design
Rechargeable battery-powered mobility
3. Components Used
Arduino Uno
ESP8266 Wi-Fi Module
Ultrasonic Sensor
Motor Driver (L298N)
4 Gear Motors
4 Wheels
Jumper Wires
Rechargeable Battery with Case
3ft x 3ft Platform (for demo)
4. Block Diagram
[Ultrasonic Sensor] ---> [Arduino UNO] ---> [Motor Driver] ---> [Gear Motors +Wheels]|[ESP8266 Module]|
[Battery Power Supply]
5. Circuit Schematic
(Refer to the attached schematic diagram image showing connection of components with Arduino UNO)
6. Working
The ultrasonic sensor measures the distance from obstacles.
Arduino processes the distance data and decides movement direction.
If an obstacle is within 20 cm, it stops or changes direction.
ESP8266 allows the rover to be monitored or controlled remotely.
7. Arduino Code Overview
#define trigPin 9
#define echoPin 10
#define motor1 3
#define motor2 4
#define motor3 5
#define motor4 6
void setup() {
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(motor1, OUTPUT);
pinMode(motor2, OUTPUT);
pinMode(motor3, OUTPUT);
pinMode(motor4, OUTPUT);
Serial.begin(9600);
}
void loop() {
long duration, distance;
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance = (duration / 2) / 29.1;
Serial.println(distance);
if(distance < 20) {
digitalWrite(motor1, LOW);
digitalWrite(motor2, LOW);
digitalWrite(motor3, LOW);
digitalWrite(motor4, LOW);
} else {
digitalWrite(motor1, HIGH);
digitalWrite(motor2, LOW);
digitalWrite(motor3, HIGH);
digitalWrite(motor4, LOW);
}
delay(100);
}
8. Applications
Educational demonstrations
Robotics workshops
Model exhibitions based on space missions
STEM learning enhancement
9. Learning Outcome
Students learned practical applications of:
Embedded systems
Wireless communication (IoT)
Robotic movement and obstacle avoidance
Circuit integration and Arduino programming
10. Conclusion
This Chandrayaan-3 rover model provides an engaging and innovative way for students to learn robotics
and embedded systems. It bridges theoretical knowledge and real-world engineering through a hands-on
project.