

Story
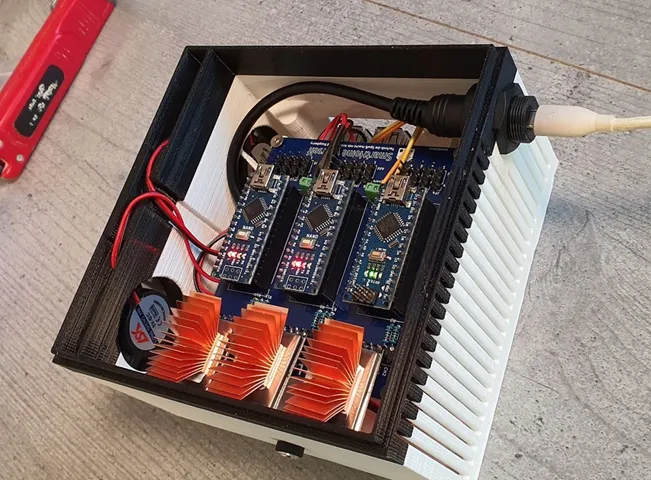
This project automatically records lap times for FPV drone races using Raspberry Pi and Arduino. Each tracked channel uses an Arduino with an RX5808 5.8GHz receiver, connected via I²C to the Pi. The Pi runs the RotorHazard system to log and analyze signal strength per channel and calculate lap times.
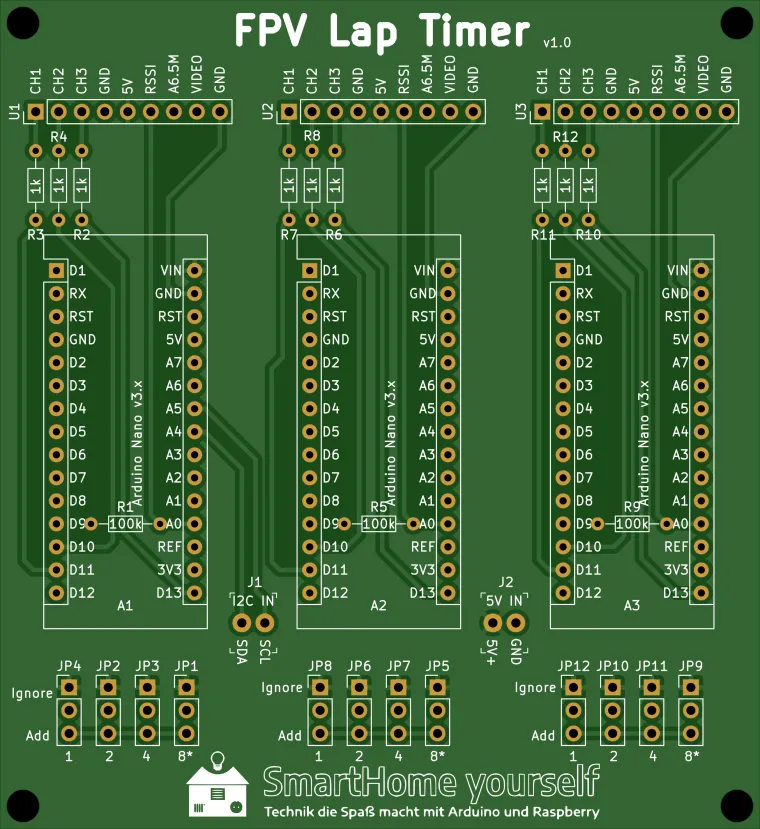
The PCB simplifies setup: just wire the I²C pins, 5V, and GND to the Raspberry Pi, set your node ID via jumper switches (1, 2, 4, 8), and you're ready to go. Includes schematic, layout, and comprehensive online documentation.
📌Highlights:
✅ Raspberry Pi with RotorHazard-compatible I²C interface
✅ One Arduino + RX5808 per drone channel
✅ Easy node ID configuration with jumpers
✅ Automatic lap time calculation from 5.8 GHz video signal strength
✅ Includes PCB design and 3D-printed case files
Information about RotorHazard: https://github.com/RotorHazard/RotorHazard
📌More info & downloads:
👉 smarthomeyourself.de/rundenzeiten-von-fpv-rennen-messen-mit-raspberry-pi-und-arduino/
Video
https://www.youtube.com/watch?v=ERcwVIFYOqw