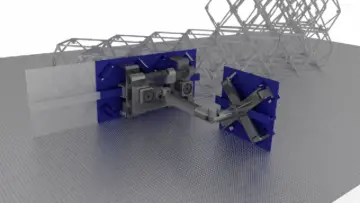
Basic idea of a Robot whose mission is to place the panels with the routing for the future laying of Tubing and Cables. The system is programmable and reversible.
3d models downloaded for reference: - Festo actuators
-Swagelok connectors.
Introducción:
-Theproposalisbasedonthedesignof robots to place panelsand pipes, followingtheRA 3D CubicTilingUnitCellmodular structuresystem.
-Designforpipe fromØ8 to Ø50 mm, Swagelokreferenceconnection.
Robots Design
Honeycombplacingrobot:
composedof servo motorsand electriclinear actuators.
Ref.: Festo actuator actuator
Robot to place pipe supports:
composedof servo motorsand electriclinear actuators.
Ref.: Festogrip
Robots Design
Robot to place and adjustconnections:
composedof servo motorsand electriclinear actuators.
Ref.:SwagelokConnection,
DashboardLayout
Thedesignof thepanel isorientedto be placed bythesamemanipulatorwhomovesit, Ithas theparticularitythatitgeneratesthepathfortherobots to movealongthepipe route. Springs actto fixitin thes