

Story
Assembly/OutfittingSystemTechnologyDevelopmentauthor: Carlos Sebastián Di Giulio
Designof robots to place panelsand routepipes,
Introducción:
-Theproposalisbasedonthedesignof robots to place panelsand pipes, followingtheRA 3D CubicTilingUnitCellmodular structuresystem.
-Designforpipe fromØ8 to Ø50 mm, Swagelokreferenceconnection.
Robots Design
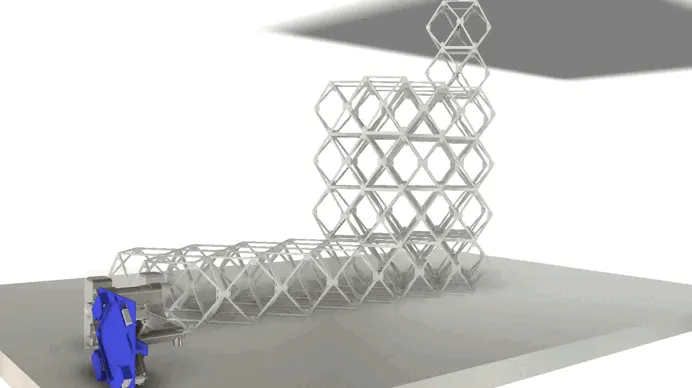
Honeycombplacingrobot:
composedof servo motorsand electriclinear actuators.
Robots Design
Robot to place pipe supports:
composedof servo motorsand electriclinear actuators.
Robots Design
Robot to place and adjustconnections:
composedof servo motorsand electriclinear actuators.
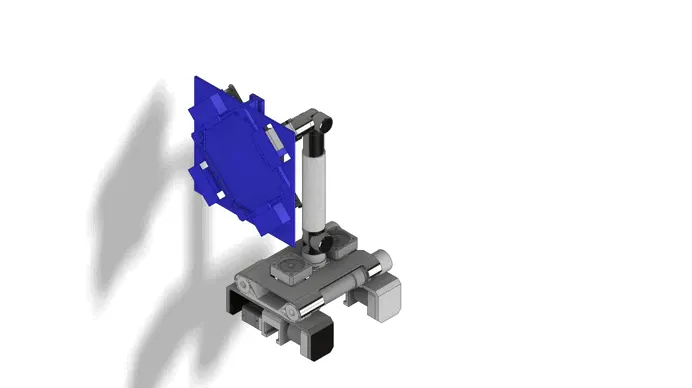
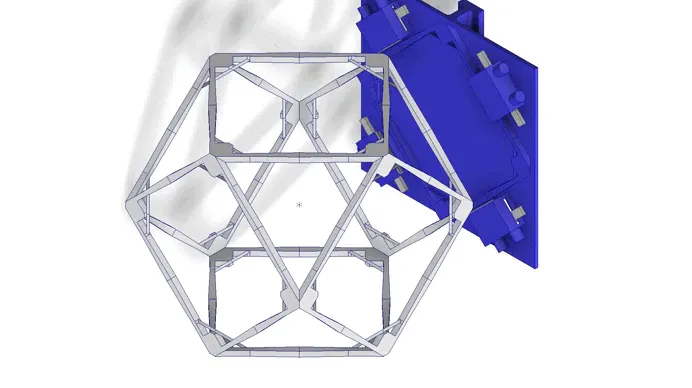
DashboardLayout
Thedesignof thepanel isorientedto be placed bythesamemanipulatorwhomovesit, Ithas theparticularitythatitgeneratesthepathfortherobots to movealongthepipe route. Springs actto fixitin thestructure.
ConnectorDesign
TheconnectordesignisbasedontheSwagelok“Two-Ferrule, mechanicalgripDesign” connectiontype.
Pipe adjustmentmechanismdesignbydrivinga pairof gears.
Ref.: SwagelokConnection,
ConnectorDesign
Lengthof pipe
Fixingndesign
Thefixationdesignisbasedonthescissorsplus springconcept, wherethemanipulatorholdsand fixessaidsupport.