





Story
Introduction
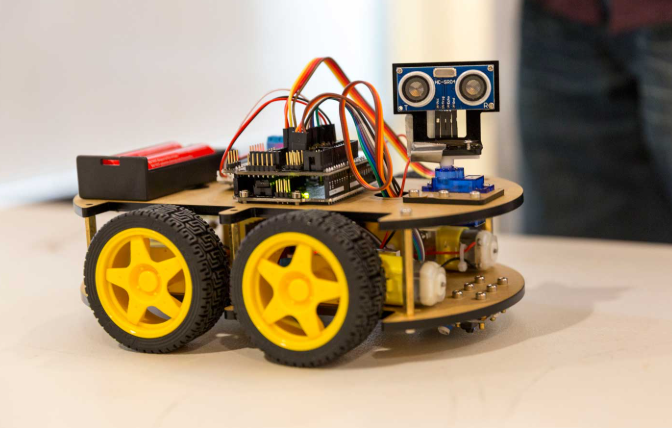
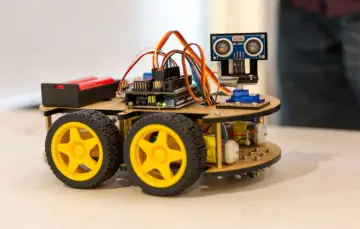
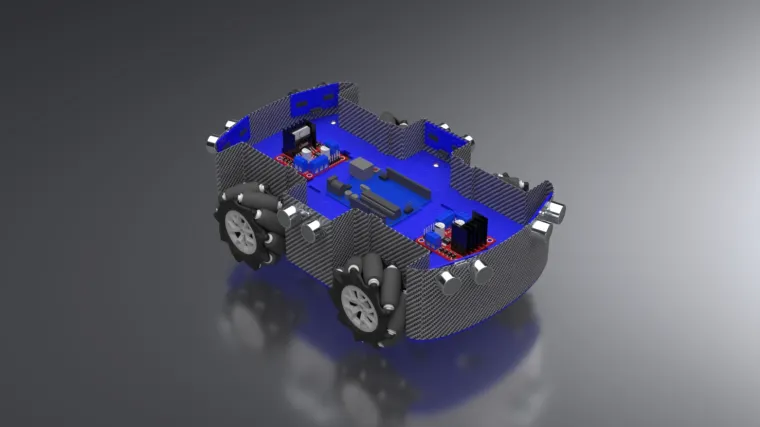
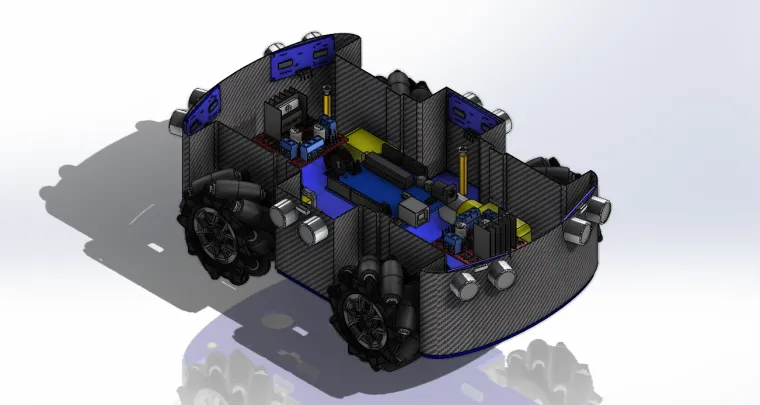
This project showcases a fully modeled obstacle-avoidance robotic car designed in SolidWorks and controlled using an Arduino microcontroller.
It serves as an early development platform for autonomous driving experiments, combining mechanical design, sensor integration, and embedded control.
Features & Design
Mechanical Structure:
-
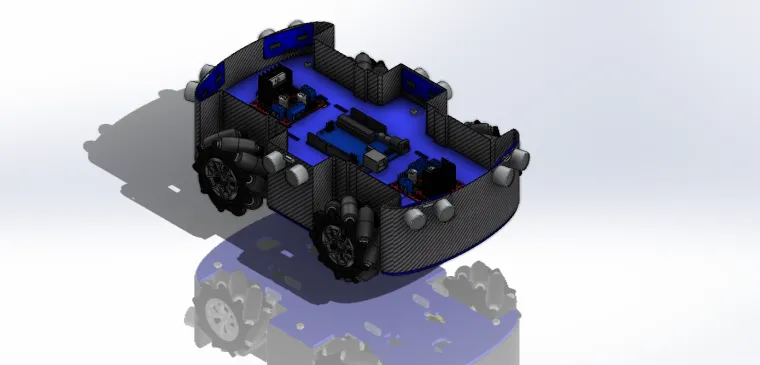
Custom-designed chassis modeled in SolidWorks
-
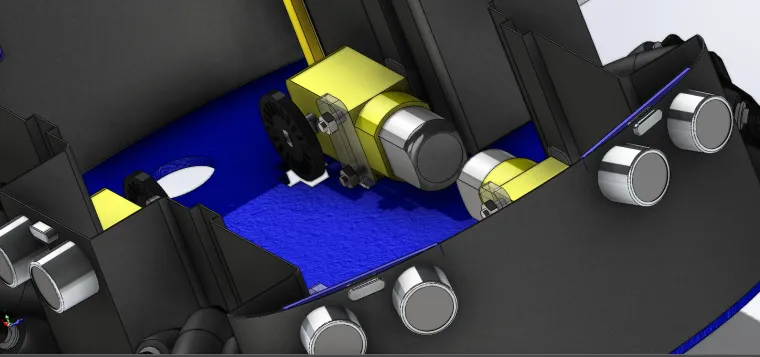
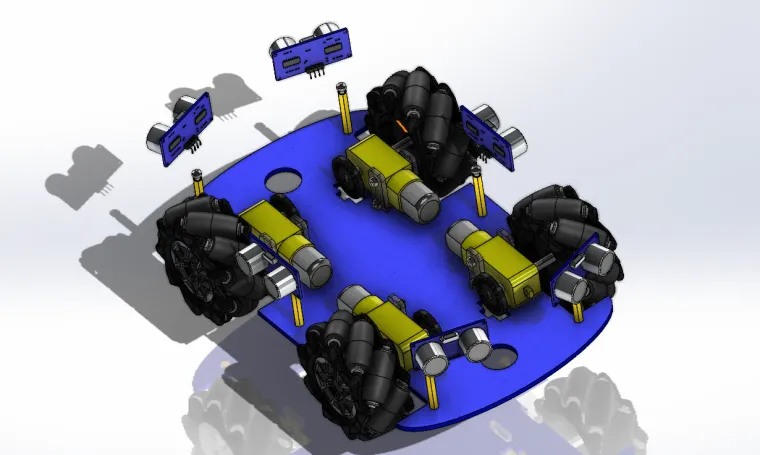
Mounting slots for 6 ultrasonic sensors
-
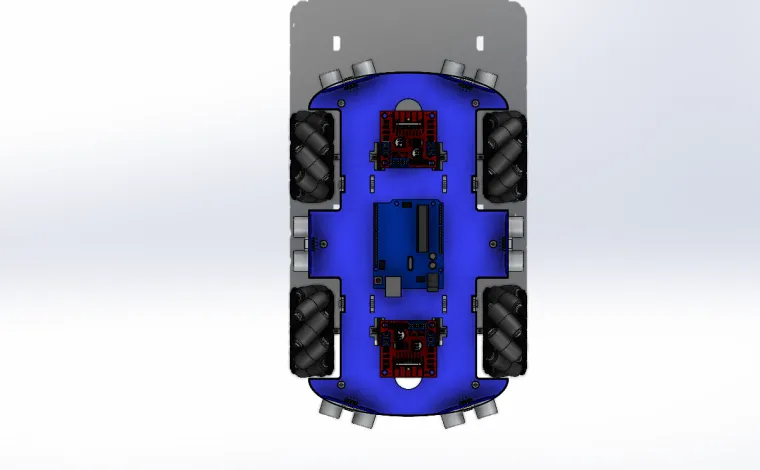
Housing for Arduino, dual motor drivers, and wiring
-
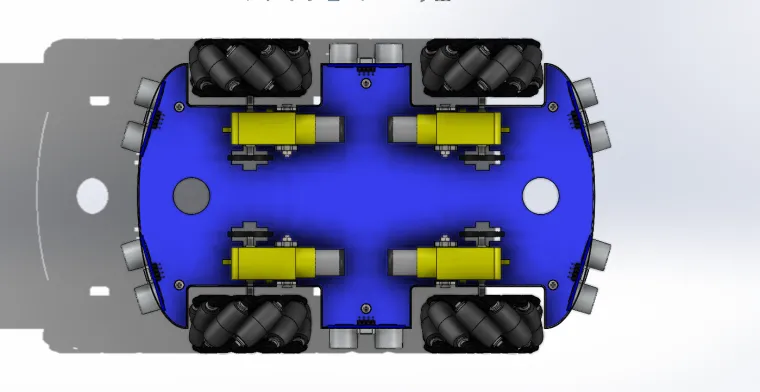
4-wheel independent motor configuration
-
Optimized sensor angles for maximum detection coverage
Electronics:
-
6× Ultrasonic sensors (HC-SR04) for 180°+ obstacle detection
-
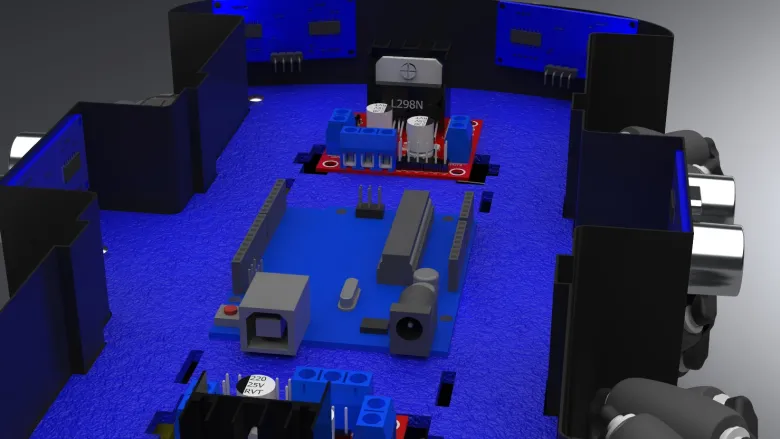
2× Motor drivers (L298N) controlling four DC motors
-
Arduino Uno as the main controller
-
Clean cable routing and component placement matching the CAD model
Control System & Logic:
-
Real-time distance scanning from six directions
-
Priority-based obstacle avoidance
-
Steering decisions based on closest obstacle
-
Smooth power delivery to motors
-
Modular code structure designed for future autonomous modes
How It Works
-
Each ultrasonic sensor continuously measures distance.
-
The Arduino processes sensor data and determines the safest direction.
-
Motor drivers adjust motor speeds to avoid obstacles.
-
The car moves autonomously without remote control.
-
The modular architecture allows adding vision, GPS, or LIDAR later.
SolidWorks Modeling Overview
-
Fully constrained assembly
-
Accurate mechanical dimensions
-
Realistic component placement
-
Mates optimized for motion study
-
Exploded view included
-
STEP + SLDASM + SLDPRT files available
tep-by-Step Build Guide
Step 1 – Mechanical assembly
-
Print or machine chassis
-
Install 4 DC motors
-
Mount ultrasonic brackets
Step 2 – Electronics setup
-
Wire sensors to Arduino
-
Connect motor drivers
-
Power distribution setup
Step 3 – Upload code
-
Flash Arduino program
-
Test sensor readings
-
Calibrate detection angles
Step 4 – Final assembly and test
-
Attach wheels
-
Run obstacle-avoidance test
-
Fine-tune speed & turning behavior