Crowtail- Rotary Angle Sensor
Description¶
Rotary angle sensor for crowduino.The angular range is 300 degrees with a linear change in value. The resistance value is 10k ohms, perfect for crowduino use. This may also be known as a “potentiometer ”.
Model: CT0053RAS

Specification¶
- Measurement angle range:0-300 degrees
- Easy to use
- Crowtail base module
- Work voltage:4.75v-5.25v
- Dimensions(mm):21.3(L)x20.0(W)x21.6(H)
Usage¶
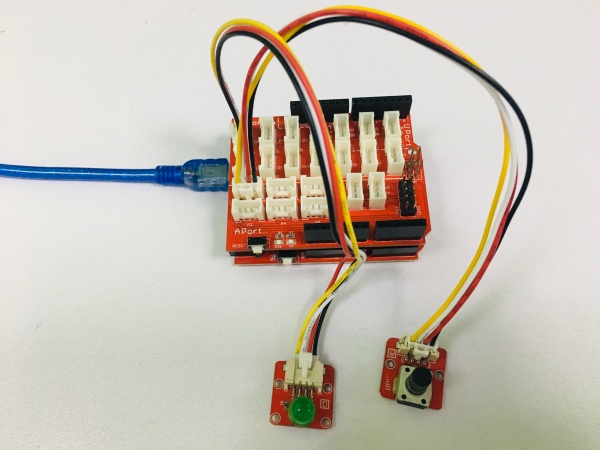
1.Hardware Connection The Rotary angle sensor is connecting to analog port A0 of Crowtail - Base Shield. A LED connecting to D5.
2.Download Crowtail__Rotary_Angle_Sensor library for Arduino boards with 16MHz XTAL; Unzip and put it in the libraries file of Arduino IDE by the path: ..\arduino-1.0\libraries;
3. Open the code and upload it into your Arduino board
#define ROTARY_ANGLE_SENSOR A0
#define LED 5//the Crowtial- LED is connected to D5 of Arduino
#define ADC_REF 5//reference voltage of ADC is 5v.If the Vcc switch on the Crowduino
#define Crowtail_VCC 5//VCC of the grove interface is normally 5v
#define FULL_ANGLE 300//full value of the rotary angle is 300 degrees
void setup()
{
Serial.begin(9600);
pinMode(ROTARY_ANGLE_SENSOR, INPUT);
pinMode(LED,OUTPUT);
}
void loop()
{
int degrees=0;
degrees = getDegree();
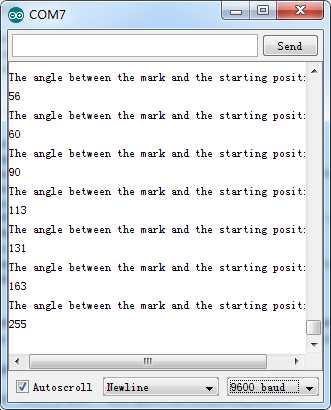
Serial.println("The angle between the mark and the starting position:");
Serial.println(degrees);
int brightness;
/*The degrees is 0~300, should be converted to be 0~255 to control the*/
/*brightness of LED */
brightness = map(degrees, 0, FULL_ANGLE, 0, 255);
analogWrite(LED,brightness); /*The range of brightness is 0~255 */
delay(500);
}
/************************************************************************/
/*Function: Get the angle between the mark and the starting position */
/*Return: -int,the range of degrees is 0~300 */
int getDegree()
{
int sensor_value = analogRead(ROTARY_ANGLE_SENSOR);
float voltage;
voltage = (float)sensor_value*ADC_REF/1023;
float degrees = (voltage*FULL_ANGLE)/Crowtail_VCC;
return degrees;
}
4. open the serial monitor to observe the change of angle data. And pay attention to the LED's brightness.